Finding myself today on a long flight overseas without access to the internet, I started wondering what it would take to make a robot that moved like a millipede. My thought was that a robot millipede could move not merely forward and back, but in any direction.
The first thing I came up with works like the following, when seen in profile:
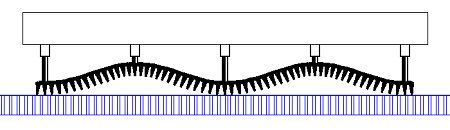
If you click on the above image you can play with the interactive applet. The basic idea is that as the surface undulates, the little “hairs” on the bottom spread out and come back together in such a way that they grip the floor and pull the robot along.
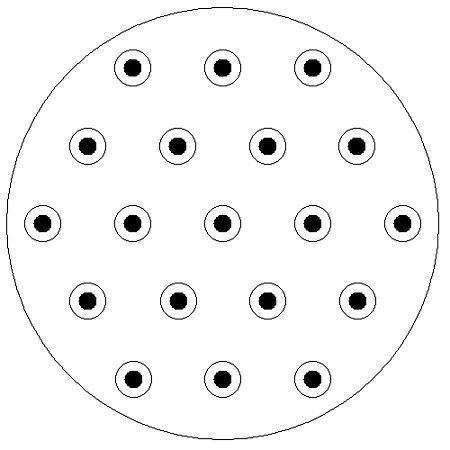
I was thinking that these “waves” of undulation could go in any direction, so at any moment the robot can move itself along the floor in any direction. One possibility is to put a regular arrangement of up/down actuators on the underside of the robot, like this:
Then it occurred to me that rather than make this a vehicle, one could cover an entire floor or table with this kind of thing. Then any object you put on the surface could be moved along under computer control. This is reminiscent of some wonderful work done by Dan Resnick a while back, in which he cleverly vibrated a table to make it move multiple objects at the same time. One problem with Dan’s approach was that the more objects you wanted to control, the slower everything moved. The millipede surface wouldn’t have that problem.
Of course it will come down to questions like “How cheap can you make an actuator that just moves slightly up and down?” Should you use solenoids, memory metals, piezoelectrics, or something else entirely? The whole thing can be scaled down to very small sizes and still work, so the answer might just come down to finding a mechanism that comes in a really low cost per unit area when the actuators are at some optimal scale.
Perhaps eventually there will be a nano-tech solution, and these things will become as cheap as wallpaper. Imagine the desk that can arrange your papers or bring you your coffee cup — or a floor that could rearrange your furniture for you. That would be very cool.
The centipede might apply very nicely to a portable massage device! Maybe it’s just me but it feels good just looking at it! (perfect for a looong flight to Japan 🙂
One of the TMG PhD students, Daniel, built something like the actuated table that you described. You must have seen it before. We’ve discussed using it to move objects around at some group meetings, but Daniel hasn’t experimented with that yet.
Xiao: I have seen a number of computer actuated pin-screen surfaces over the years, including the wonderful recent one in Hiroshi’s lab that Daniel built. Hiroshi (and, I suspect, Daniel also) knows about the prior work in this area, which includes the Feelex, the Lumen Project, and the Aegis Hyposurface.
What I haven’t seen is somebody use these tables to transport objects laterally across their surface. I see no reason why Daniel’s table can’t do that, although because Daniel’s table has a relatively coarse arrangement of pins, it would be best at moving objects that are significantly smaller than the pin spacing — like a small ball that gets passed from one actuator to the next.
If you could get the inter-pin spacing much smaller than it is on Daniel’s table, then you could use the surface to move multiple arbitrarily shaped objects simultaneously. That’s what I was trying to get at in my post.
This general undulating principle could really work, but I’m afraid both your animations won’t. (Neighboring actuators have a phase difference of 180˚, which means the direction in which the wave propagates is not defined). On the other hand, I guess finer sampling should do the trick.
By the way, I just discovered your blog and will probably spend the better part of my remaining life here. Expect a C&D from my employer and/or wife anytime soon 😉